cloud.ntp.admtan.jp AAAA レコード (IPv6) と A レコード (IPv4) の両方が設定されています。v6.cloud.ntp.admtan.jp IPv6 用 (AAAA レコードのみが設定されています)v4.cloud.ntp.admtan.jp IPv4 用 (A レコードのみが設定されています)ntp.admtan.jp AAAA レコード (IPv6) と A レコード (IPv4) の両方が設定されています。v6.ntp.admtan.jp IPv6 用 (AAAA レコードのみが設定されています)v4.ntp.admtan.jp IPv4 用 (A レコードのみが設定されています)/etc/systemd/timesyncd.conf の NTP セクションに上述のアドレスを追記して systemd-timesyncd.service を restart してください
chrony.conf または ntp.conf に以下の設定を追記してください。この例示では ntp.admtan.jp を指定していますが、環境に応じて上述のそのほかのアドレスに書き換えてください。
server ntp.admtan.jp minpoll 6 maxpoll 8 ibusrt
Windows の NTP クライアント機能は既定ではステップモードで同期します。いきなり時刻が飛ぶと、時系列データなどを扱う場合に不都合が生じる場合があります。そのような場合は徐々に時刻を修正する Slew モードで構成するのが最適です。設定方法をまとめてあります: Windows の NTP クライアント機能 (w32tm) を Slew モードで構成する方法
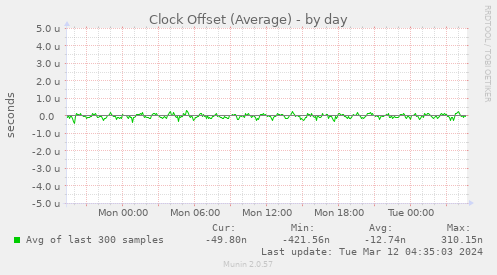
サーバーソフトウェアが出力する時刻ソースと内部クロックのオフセットを集計してプロットしています。Max と Min はそれぞれ過去 300 件に含まれる最大値・最小値を表します。Avg は平均値、Delta は最大値と最小値の差を表します。
クラウド (cloud.ntp.admtan.jp) の精度情報については、NTP Pool Project のウェブサイトからより客観的なものが閲覧できます。IPv6, IPv4
クラウド (cloud.ntp.admtan.jp)
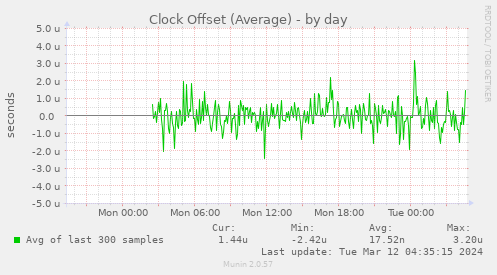
ローカル (ntp.admtan.jp)